6 Z-Transform
憧憬是距离理解最遥远的感情。

TIP
说实话,我真没感觉出这里的 ZT 和信号与系统里的 ZT 有什么区别 ...
搞不好,信号与系统里学的还深一点。
带 ☆ 的内容为 Key Points。
章节目录
- 章节目录
- 6-1 ☆ Z 变换的定义与性质
- 6-2 有理 Z 变换 Rational ZT
- 6-3 有理 Z 变换的 ROC
- 6-4 ☆ 反 Z 变换 Inverse Z-Transform, IZT
- 6-5 ☆ ZT 的性质
- 6-7 传递函数 Transfer Function
6-1 ☆ Z 变换的定义与性质
CAUTION
本节被标注为 Key Point 。
6-1-1 ☆ 从 DTFT 到 ZT
回顾 DTFT 的定义式:
不难发现,其自变量被限制在了 复平面的单位圆 Unit Circle 上。
思路打开,如果我们不再拘束于单位圆,而选择将自变量扩展到整个复数域上,就可以得到 Z 变换的定义。
即,一个离散序列的 Z 变换为:
其中
。
6-1-2 ☆ Z 变换的基本性质
1. Z 变换的退化
可以使用极坐标的方式换元
如果我们令
2. 收敛域 Region of Convergence, ROC
对于 ZT 定义式中的无穷级数项:
,显然
对于一个给定的序列,使该序列的 ZT 能收敛的
3. ROC 的条件
回到 ZT 的极坐标表达,我们可以将 ZT 看作对序列先做
通过这样的等效,我们可以采取 DTFT 收敛的方法来分析 ZT 的 ROC。
由于 DTFT 在复平面中等效为一个单位圆上的旋转,因此 ZT 在复平面可以看作不同半径为
同时也可以想到, ZT 收敛的条件为加权序列
NOTE
Z变换是一种Laurent级数的形式,并且在ROC中的每个点都是一个解析函数。
6-1-3 ☆ 基本序列的 Z 变换
| Sequence | Z-Transform | ROC |
|---|---|---|
| All values of | ||
6-2 有理 Z 变换 Rational ZT
6-2-1 有理 ZT 的基本形式
在本科阶段的课程中,我们通常只关注有理的 Z 变换。
通常,一个有理 ZT 可以写作两个多项式所构成的分式:
或者因式分解形式:
6-2-2 有理 ZT 的零点 Zeros 和极点 Poles
对于一个有理 ZT
- 将其分子的根称为这个 ZT 的 零点 Zeros,使得
- 将其分母的根称为这个 ZT 的 极点 Poles,
趋于无穷大。
如果 ZT 的形式为:
这个因子会额外在原点
- 情况一:
此时
也就是说,除了原本的
- 情况二:
此时
因此在
也就是说,除了原本的
6-3 有理 Z 变换的 ROC
单独的 ZT 无法唯一确定原序列的表达式。必须要带上 ROC 才能推断原序列。
因此一个标准的 ZT 表达式必然带有其 ROC 。
6-3-1 基于方向分类序列
我们可以按照以下四种方向来分类离散时间序列:
- 有限序列 Finite Sequence
- 右侧序列 Right-sided Sequence
- 左侧序列 Left-sided Sequence
- 两侧序列 Two-sided Sequence
X 侧序列的意思是该序列在坐标轴上向 X 侧无限延伸。
例如一个右侧序列自变量的有效取值范围为:
6-3-2 序列的 ROC
在开始之前,必须要阐述一条非常重要的原则:
IMPORTANT
极点 Poles 决定了 ROC 的边界。
换而言之,在复平面上,ROC 的区域绝对不能包含极点。
假设复平面上有
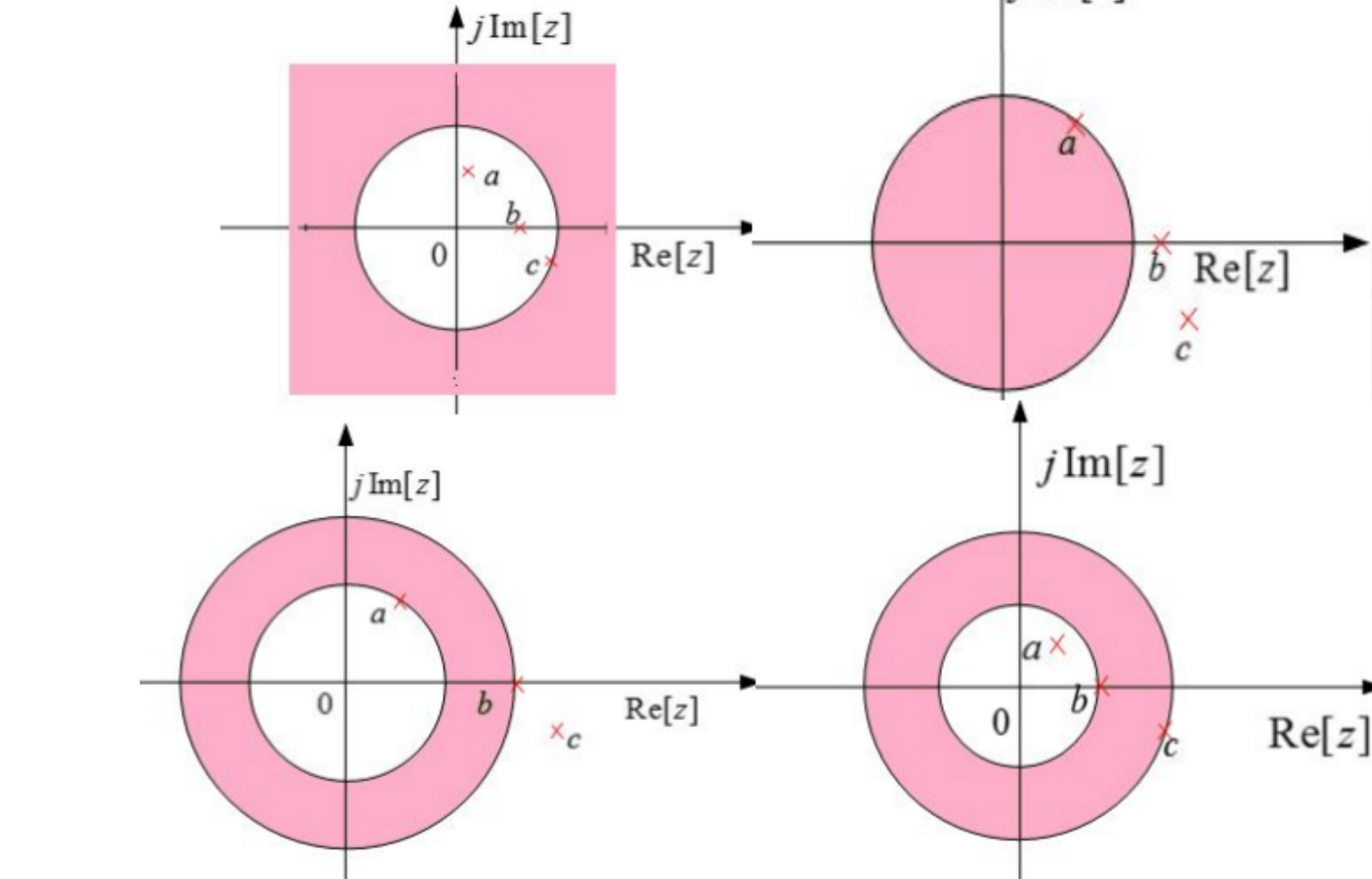
1. ROC:
- 区域:所有极点之外
- 序列类型:右边序列(若从
- 物理意义:信号向右无限延伸;因果时只在
2. ROC:
- 区域:介于
与 之间 - 序列类型:双边序列
- 结构:
- 一部分为右边序列(由
对应) - 一部分为左边序列(由
对应)
- 一部分为右边序列(由
3. ROC:
- 区域:介于
与 之间 - 序列类型:双边序列
- 结构:
- 一部分为右边序列(由
对应) - 一部分为左边序列(由
对应)
- 一部分为右边序列(由
4. ROC:
- 区域:所有极点之内
- 序列类型:左边序列(若只在
- 物理意义:信号向左无限延伸
NOTE
ROC 一定是不包含任何极点的连通区域;
对于
本题中:
6-4 ☆ 反 Z 变换 Inverse Z-Transform, IZT
CAUTION
本节被标注为 Key Point 。
6-4-1 ☆ 留数定理及一般表达式
1. 留数 Residue
其中
2. 留数定理 Cauchy's Residue Theorem
TIP
围道积分 Contour Integral 是复变函数中的核心概念,本质上是沿着复平面上一条曲线进行的积分。
设
核心思想:复杂的围道积分可以转化为对各奇点留数的求和,极大地简化了计算。
3. ZT 的一般形式
逆 Z 变换定义为:
其中
- 上述围道积分直接计算非常困难
- 可以利用 柯西留数定理 来求解该围道积分:
根据留数定理,令
若
- 当
为逆时针方向时:
- 当
为顺时针方向时:
4. 使用留数定理求 IZT
- 若
是
TIP
方法:把导致分母为零的因子
- 若
是 的 阶极点(即分母含
例:用留数定理求逆 Z 变换
题目: 已知
第一步:构造被积函数
第二步:找极点
第三步:计算留数
第四步:求和
6-4-2 ☆ 查表法求解 IZT
例:
分母因式分解:
查 Z 变换表,已知变换对:
对比可知
TIP
查表法是最简单且最常用的方法。反正是开卷考试,直接打印一张查询表就行了~
6-4-3 ☆ 部分分式法求解 IZT
其中
WARNING
每个
1. 展开的一般形式
设:
当
展开为部分分式:
其中
2. 各系数的求法
例:部分分式展开
已知:
此处分子阶数
然后对
6-4-4 ☆ 长除法求解 IZT
由于
WARNING
使用长除法时,必须先根据 ROC 判断序列类型(因果/反因果/双边),再选择合适的展开方向:
- ROC 为
的正幂展开 - ROC 为
的正幂展开 - ROC 为环形区域 → 拆分后分别展开
例:双边序列的长除法
题目: 求
分析 ROC: 收敛域是环形区域,因此
- 极点
- 极点
第一步:部分分式展开
第二步:对每一项做长除法
左边序列项
右边序列项
第三步:合并,写成级数形式
第四步:读出系数得到
6-5 ☆ ZT 的性质
CAUTION
本节被标注为 Key Point 。
| 性质 | 序列 | Z 变换 | ROC(收敛域) |
|---|---|---|---|
| 基本定义 | |||
| 共轭 | |||
| 时间反转 | |||
| 线性性 | 至少包含 | ||
| 时移 | 与 | ||
| 指数加权 | $ | ||
| 微分性质 | 与 | ||
| 卷积 | 至少包含 | ||
| 调制(乘积) | 至少包含 |
Parseval's Relation
TIP
ROC 运算规则(常用结论)
若:
则:
时间反转:
调制(乘积):
6-7 传递函数 Transfer Function
6-7-1 定义
LTI 系统的冲激响应的 ZT 称为传递函数 Transfer Function,一般是
在大多数实际应用中,所关注的 LTI 数字滤波器由具有常数和实系数的线性差分方程表征,因此其传递函数是有理 ZT 。
在时域中,给定冲激响应
对两边同时做 ZT ,可得
这里的
6-7-2 传递函数的表示
1. FIR 系统的传递函数
FIR 系统的冲激响应
其特点是没有非零反馈极点;若把
2. IIR 系统的传递函数
IIR 系统由常系数线性差分方程描述:
对两边做 ZT :
处理得:
3. 传递函数的因式分解形式
对上面的分式做因式分解,得到一般形式:
其有以下特征:
均为有限零点, 均为有限极点; - 对于任意因果 IIR 系统,其 ROC 在最大极点外侧,即
6-7-3 来自传递函数的频域响应
频率响应就是传递函数在单位圆上的取值:
将
代入
其中:
- 幅度响应:
- 相位响应:
6-7-4 频域响应的几何解释
1. 零点向量与极点向量
定义从每个零点/极点指向单位圆上
- 零点向量:
,角度 ) - 极点向量:
,角度 )
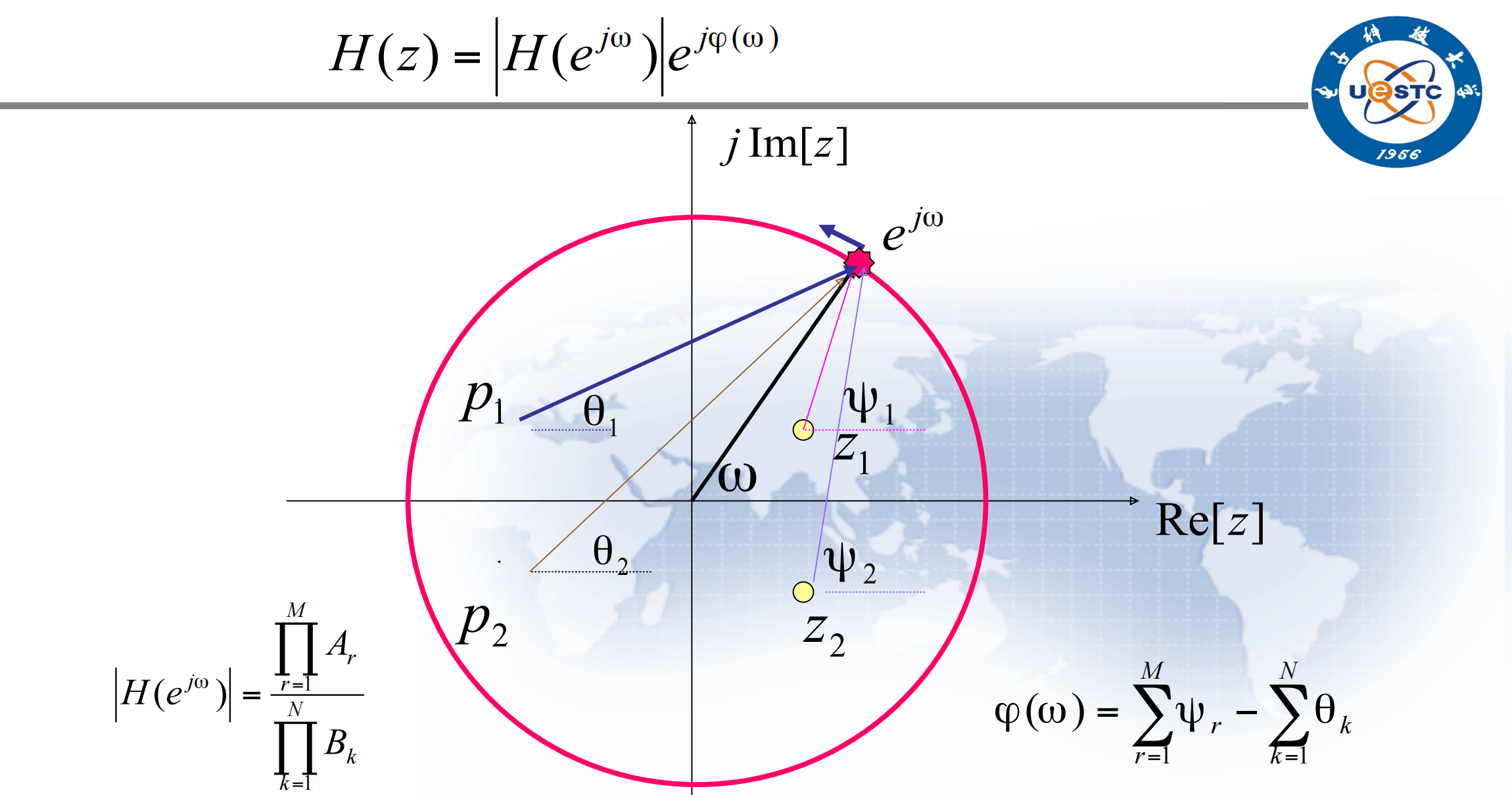
2. 频率响应的相位表达
IMPORTANT
幅度响应 = 零点向量长度之积 / 极点向量长度之积:
相位响应 = 零点向量角度之和 - 极点向量角度之和:
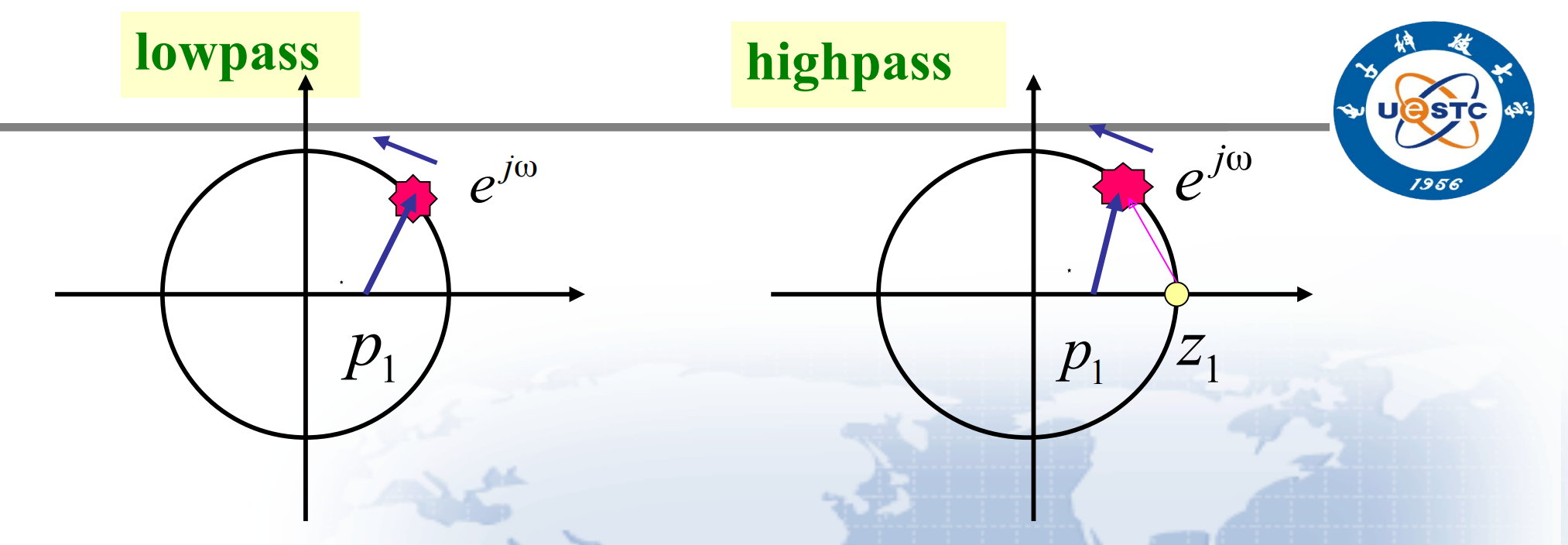
3. 低通滤波器与高通滤波器
低通滤波器: 极点
离极点很近 → 极点向量短 → 分母小 → 增益大 增大时, 远离极点 → 增益下降
高通滤波器: 极点
增大时,零点向量变长 → 增益增大 → 高频通过
NOTE
零点的位置决定频率响应中凹谷的位置和深度:
- 零点在单位圆上 → 该频率幅度恰好为 0
- 零点趋近单位圆 → 该频率幅度趋近于 0
极点的位置决定频率响应中峰值的位置和高度:
- 极点趋近单位圆 → 该频率幅度趋近于
- 对因果系统,极点在单位圆外 → 系统不稳定
TIP
设计滤波器的几何直觉:想象一个点沿单位圆转一圈,它到各零点距离之积 / 到各极点距离之积,就画出了幅度响应曲线。
想衰减哪个频率就在那里放零点,想增强哪个频率就在那里放极点。
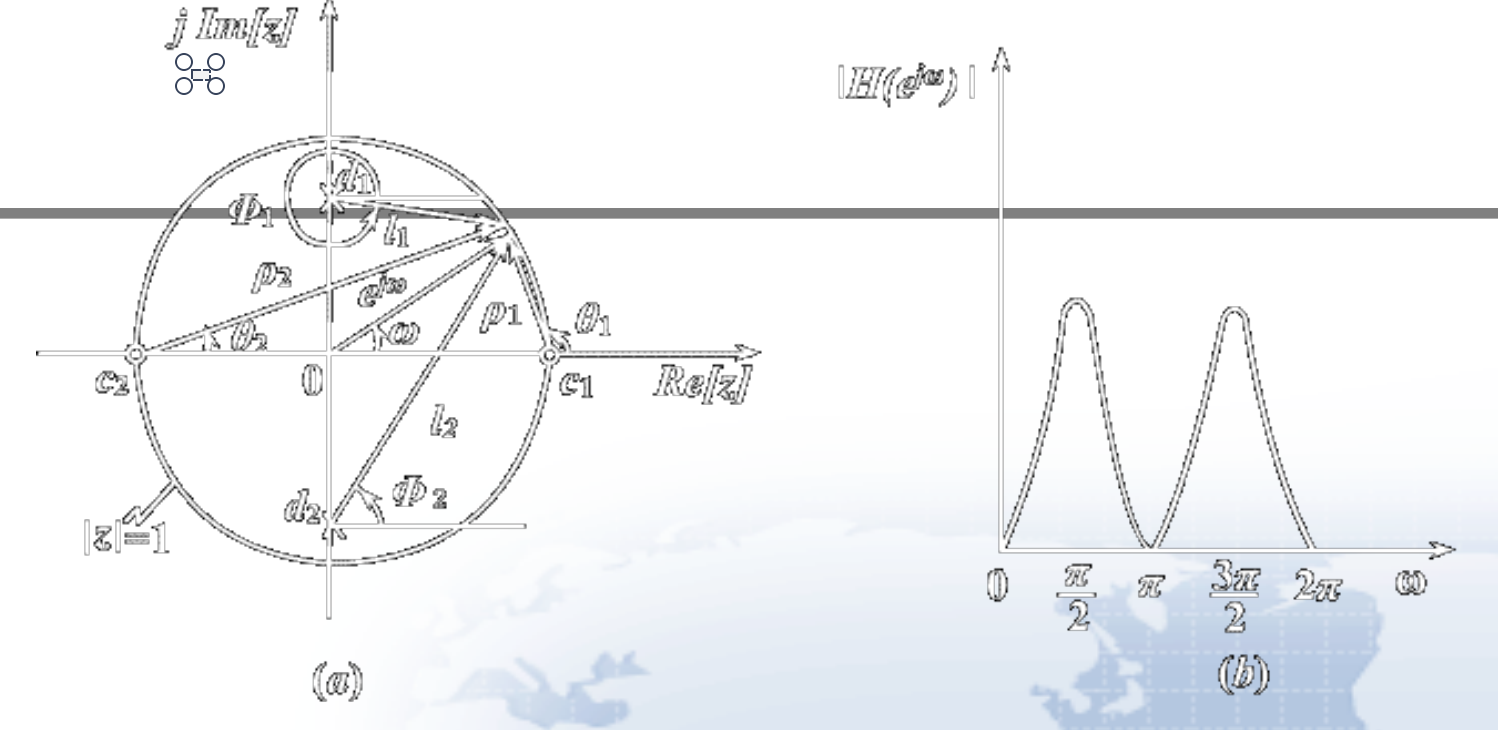
(好逆天的图,我要瞎了)
6-7-5 极点位置与稳定条件
1. BIBO 稳定条件
LTI 数字滤波器 BIBO 稳定的充要条件为冲激响应绝对可和:
等价于:
2. 因果系统的稳定判据
对于因果 LTI 系统,ROC 为
因果系统稳定 等价于 所有极点都在单位圆内部。
3. FIR v.s. IIR 的稳定性
| 类型 | 稳定性 | 原因 |
|---|---|---|
| 因果 FIR | 永远稳定 | |
| 因果 IIR | 不一定稳定 | 需确保所有极点满足 $ |
WARNING
即使 IIR 滤波器设计时所有极点都在单位圆内,实际数字实现中由于系数的量化误差(有限字长效应),极点位置可能发生偏移,导致原本稳定的滤波器变得不稳定。